
Eğitimler
SerialCallResponse
Bu örnek, bir çağrı ve yanıt (el sıkışma) yöntemi kullanılarak Arduino veya Genuino kartından bilgisayara çok baytlı iletişimi gösterir.
Bu çizim başlangıçta bir ASCII A (65 değeri bayt) gönderir ve bilgisayardan seri bir yanıt alana kadar bunu tekrarlar. Ardından üç sensör değerini tek bayt olarak gönderir ve bilgisayardan başka bir yanıt bekler.
Gönderilen verileri görüntülemek için Arduino Yazılımı (IDE) seri monitörünü kullanabilirsiniz veya İşleme (aşağıdaki koda bakın), Flash, PD, Max / MSP (aşağıdaki örneğe bakın) vb. İle okunabilir.
Gerekli Donanım
- Arduino veya Genuino Kurulu
- 2 analog sensör (potansiyometre, fotosel, FSR, vb.)
- butona basınız
- 3 10K ohm direnç
- bağlantı telleri
- breadboard
Yazılım Gerekli
- İşleme veya
- Maks / MSP sürüm 5
Devre
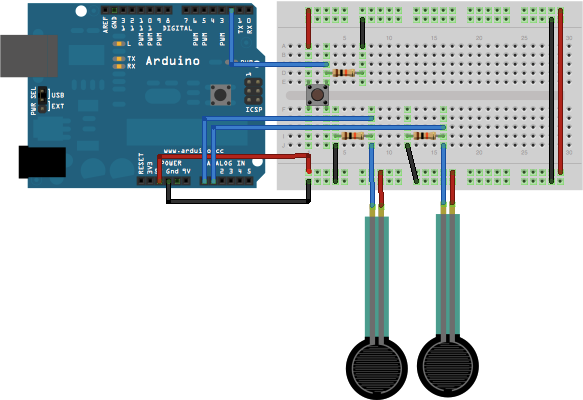
Gerilim bölücüler olarak kullanılan 10K ohm dirençlerle analog sensörleri analog giriş pimi 0 ve 1'e bağlayın. Toprağa referans olarak bir 10K ohm direnç ile dijital I / O pin 2'ye bir düğme veya anahtar bağlayın.
büyütmek için resme tıklayın
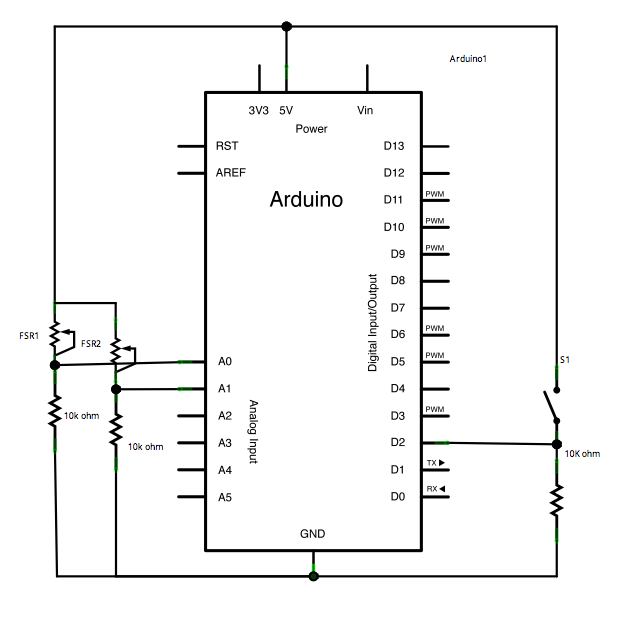
Şematik
büyütmek için resme tıklayın
Kod
Serial Call and Response
Language: Wiring/Arduino
This program sends an ASCII A (byte of value 65) on startup and repeats that
until it gets some data in. Then it waits for a byte in the serial port, and
sends three sensor values whenever it gets a byte in.
The circuit:
- potentiometers attached to analog inputs 0 and 1
- pushbutton attached to digital I/O 2
created 26 Sep 2005
by Tom Igoe
modified 24 Apr 2012
by Tom Igoe and Scott Fitzgerald
Thanks to Greg Shakar and Scott Fitzgerald for the improvements
This example code is in the public domain.
http:egitim.aspx?e=SerialCallResponse
*/
int firstSensor = 0; // first analog sensor
int secondSensor = 0; // second analog sensor
int thirdSensor = 0; // digital sensor
int inByte = 0; // incoming serial byte
void setup() {
// start serial port at 9600 bps:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
pinMode(2, INPUT); // digital sensor is on digital pin 2
establishContact(); // send a byte to establish contact until receiver responds
}
void loop() {
// if we get a valid byte, read analog ins:
if (Serial.available() > 0) {
// get incoming byte:
inByte = Serial.read();
// read first analog input, divide by 4 to make the range 0-255:
firstSensor = analogRead(A0) / 4;
// delay 10ms to let the ADC recover:
delay(10);
// read second analog input, divide by 4 to make the range 0-255:
secondSensor = analogRead(1) / 4;
// read switch, map it to 0 or 255L
thirdSensor = map(digitalRead(2), 0, 1, 0, 255);
// send sensor values:
Serial.write(firstSensor);
Serial.write(secondSensor);
Serial.write(thirdSensor);
}
}
void establishContact() {
while (Serial.available() <= 0) {
Serial.print('A'); // send a capital A
delay(300);
}
}
/* Processing sketch to run with this example:
// This example code is in the public domain.
import processing.serial.*;
int bgcolor; // Background color
int fgcolor; // Fill color
Serial myPort; // The serial port
int[] serialInArray = new int[3]; // Where we'll put what we receive
int serialCount = 0; // A count of how many bytes we receive
int xpos, ypos; // Starting position of the ball
boolean firstContact = false; // Whether we've heard from the microcontroller
void setup() {
size(256, 256); // Stage size
noStroke(); // No border on the next thing drawn
// Set the starting position of the ball (middle of the stage)
xpos = width / 2;
ypos = height / 2;
// Print a list of the serial ports for debugging purposes
// if using Processing 2.1 or later, use Serial.printArray()
println(Serial.list());
// I know that the first port in the serial list on my Mac is always my FTDI
// adaptor, so I open Serial.list()[0].
// On Windows machines, this generally opens COM1.
// Open whatever port is the one you're using.
String portName = Serial.list()[0];
myPort = new Serial(this, portName, 9600);
}
void draw() {
background(bgcolor);
fill(fgcolor);
// Draw the shape
ellipse(xpos, ypos, 20, 20);
}
void serialEvent(Serial myPort) {
// read a byte from the serial port:
int inByte = myPort.read();
// if this is the first byte received, and it's an A, clear the serial
// buffer and note that you've had first contact from the microcontroller.
// Otherwise, add the incoming byte to the array:
if (firstContact == false) {
if (inByte == 'A') {
myPort.clear(); // clear the serial port buffer
firstContact = true; // you've had first contact from the microcontroller
myPort.write('A'); // ask for more
}
}
else {
// Add the latest byte from the serial port to array:
serialInArray[serialCount] = inByte;
serialCount++;
// If we have 3 bytes:
if (serialCount > 2 ) {
xpos = serialInArray[0];
ypos = serialInArray[1];
fgcolor = serialInArray[2];
// print the values (for debugging purposes only):
println(xpos + "\t" + ypos + "\t" + fgcolor);
// Send a capital A to request new sensor readings:
myPort.write('A');
// Reset serialCount:
serialCount = 0;
}
}
}
*/
/* Max/MSP version 5 patch to run with this example:
----------begin_max5_patcher----------
3908.3oc6ckziiaiE9b0+J3XjCIXpp.WzZNMURv.jCInQ5fYNjNngrDssRKK
4nkp6JA4+973hrkrsjncKu0SRiXasQ83G+dKj7QV+4qtaxzrOxKlf9Zzuft6
t+7U2cm7ThSbm936lrL3igIAExaaRJ+CYS+sI2qtTI+ikxSuBMKNojm+N3D4
Aua5KkPwpuoUAkgKhSm+tbdXo5cQXVOhuGwrohuHD4WT7iXzupen3HY4BuqG
rH0kzrrzxzfkb4kdJONHo9JoUKiSS3kRgjt4jYUk0mkznPJh+CYgHewpSqty
xWVwUh3jIqkEYEfmqQEMr.ETbB+YddQbVZix+tIAqV03z203QDX4ukIKHm6W
ep3T0ovqOUN+435m2Rcx+5U0E+FTzVBh9xOsHXIh5YuADg1x4IYgumG0r3mj
shmFmtJmWvSKCJ0um0WNhOKnJo7c6GmZe8YAg7Ne381Rc2j44wQYoBgn0SJN
c8qCHH1RhQqJi7NRCVsmGt.pGUESCxE31zDdCV.PRyxRZeo0MU.WOHMdYPIu
LVIrT75BMd4p73zxVuHdZ.TFKJByyRRZUTpq77dtRDzZFx+PbT4BYY0DJgaO
dUcSvj0XTT7bdQY6yUFLun8YZo71jl0TIt042RYNLa4RfCTWfsznKWDWfJpl
tJHrbgV6t.AZInfzWP.4INpJHA8za91u+6QN1nk7hh.PpQwonxEbTAWzpilV
MimilkmsDtPbo3TPiUdY0pGa9ZShS4gYUJz1pwE1iwCpxbAgJI9DGGwWNzFT
ksLf3z7M0MybG6Hj1WngsD7VEXS8j5q7Wu5U0+39ir8QJJS5GMHdtRimL4m1
0e1EVX0YsE2YssINriYRoFRyWVMoRRUGQvnkmms3pnXDYHbBKMPpIOL5i1s8
3rMPwFcRCsGRyPH780.8HBnpWz.vlEQBWJ+0CSunehJSmJxiIZRtNGhhDYrU
jt3ZQyA2fHJhZDifXIQHUHH8oGYgOREI5nqHIzhFWUndPyBdB3VzHJGwUhkV
rgvRl2UCVNMHcd234lf1DN16HFEIdHt99A5hrp7v5WWMSBQZgMP.Tkwoqig8
W1.Sn1f3h3nn1wLpBypPDzlJ7XinEGkLiMPloWOhrgR7dpZWJQV1faDy35Qj
MThMFkWFGsJChQPqrQp8iorV6Q28HBVF4nMVDJj7f1xyYACFScisg.ruLHOW
uMUS4Am4pI4PTnHi.6bi02HNzSYnDBe4cgAgKzRk1jc8PJLoH3Ydz6.Q.7K8
tfxx73oUkJq1MGuCy5TpAi.POWZ3AenidLOOIaZPhdjZVW3sdk6LXEGzHb7p
Mfr7SEy3SXHyBSxJ3J2ncNNYVJsXG6Me10nj4cfCRFdTFjLo7q3SiCpjjEDM
.nvra.GN39.E2CDTHWXPo8.xzfqrHCHKnf5QUYUVdoZPUjCSC7LU8.XtTUXl
X8vr51GjwFGLC2AlMdLkU4RiaRrnmJuiudnDk0ZW+9p6TuKBe433JUCzp6fU
iOF0SUk2UQYUPNTEkiZubvKa1tsmgL5SCTXGHnnG0CceLpkpR9Rs28IUESWl
EwWNKfHlg.zj6Ee7S+nE8A+m9F7Cu40u9gMm+aRp3kYYkKd3GDOz5y+c7b96
K9gfvuIK68uNO6g2vUUL80WxihCVFD9vlB30e2SOrmxUb527RZ3nZNrljGrR
70vs1J9suWuZ3zaHVdG3RIJLgGj2Gfn6TcGcstEfvtH.hpFLlnBndjOLGQAI
z98BXc6yQxghmOn6gZqj0ShPOXhynLOjzCESt+XwE8TxrCvrdXo16rqnLgvb
HaFmbh29QD+K0DyNdjDwvzQL.NXpoMvoOBxkger0HwMRQbpbCh91fjjG9Idw
prTH9SzaSea5a.GQEPnnh43WNefMlsOgx18n.vgUNO.tKl7tDyI3iHzafJHZ
VVNedVEbGgYIY42i93prB0i7B7KT1LnnCiyAiinpBnsPV7OG.tYKfBsrJOkG
UG5aq26iJw6GyJ4eM5mEgEKaNQPMEBUp.t8.krplOVTlZdJAW27bjvGK7p2p
HQPgLOSJDYv4E9gQBYBjMUselRxDy+4WplIzm9JQAWOEmfb.E364B43CAwp5
uRRDEv8hWXprjADMUOYpOg9.bVQpEfhKgGCnAnk.rghBJCdTVICA3sDvAhE5
oU4hf67ea5zWPuILqrD8uiK+i477fjHIt9y.V88yy3uMsZUj7wnxGKNAdPx5
fAZMErDZOcJU4M01WFQokix.pKa+JE1WacmnKFeYd7b.0PeIzB8Kk+5WIZpB
Ejt34KJeHgOCh4HK8Y3QiAkAfs8TRhhOkG7AAGQf0qxyfmQxa+PLb8Ex.2PS
4BdO5GB9Hvg+cfJCMofAIMu9Qz+UPCjckqVJlEmyA8Bf.rC6.3hAEuG8TdTU
bZljQ0nr1ayIqmTwQYfyRGafZhur5vfuyMSqYNWmtAPwWHalDSuUgT0Bosh.
JpAR89Y6Ez5QEfPTQO4J0DHLInIliz8BZV2JfV3Bd36qsQwAVVXbr1BGXp6s
Sd5sSDruo74wofx.HxUgxQwTnMLqTXvRmiGh2PUZr5pBynKChjl6feNUjSRn
hEUfRPT1GfG9Ik4TQBm.hEZZ.bc38HjAMKGzDRijEm1ifx1dbgzQyKh6FZc3
wOCkRJH+KUh0daWs6wzltWx1puXxlWW6NZWY2JiTBzzILRIANku02NourySM
VI1VJTvQZff32AJr+dS9e34QAoA6EGXlGFH9yk7yyQAlVd3SR94g+TxOu1sU
Flgd6ICI96LzazyPu1cgqsZ8r74SgF.65+efbMf4pGHT7lgHh30Sha3N5Ia.
oqjMf7nsuMwycf7iYDybiAAVr3eC.oTMjpzEr8GDRc9bFRGHYXDrzg.Tlx+q
NW8TY1IkzCfZ2IftkQstbB08HUezoDS+oFyI.cWIhWBaDiUo7qIrDO7f.L6n
AXqCmyNT9act.z+Iv.GR0uES0ZXfjdz.IczAxQOUR+zvRsUTigRxmyPYeNlj
yXv8Peef2ZFzuLzWPPeAE8ELzWXYlhe8WzAcUg+b1UkIoCLzIH60zwASGXau
a1Dq2nUY.sox4vng+m0nACePngC9lEMLZMBPodOxf+yx5d4uMCTHm3kJvIIG
jcLMedEQldkjpoBkQyjY1Hk.hmSY95Iwos8NDb9VSlIWOIntqgxryUjL6bCJ
y1lli5tWWxrQ7YmqGYlc6shK1iY2dr0wtNjYxgHyzaq0OznY235awCr8zSz6
EGd1QNUKf.74dADTBbTbeotjpW95IolY0WpKYONY8M83Rx2MChx3fL+iG5Mm
tXpdmvXj8uTvaAL1WjbbarQD4Z6kXBpnm6a69oKV2PY9WY174IbC3CaRQ9iK
Q4sYGQpwdtZ5wFrc7n569.M83OOR5ydSB1ZcAWCxdbKuavz9LILxfD.wWO.W
Nq+Zu4Es+AP6s5p9jDWH8ET+c85+XbW0.N1nDCTD7U4DGc6ohnU019fS7kQ0
o43luuOGjv5agHp0DT.CysOfgLR3xXlXTUKm16RivRsn3z0O6cl3YScAvtrb
hwekGB7BZuqESUzBJWmCvK7t9HF8Ts6cUAPoFWso3aP8ApWyJ3wqOPo2pJDC
BQ0NI0Pj8QCQ2r1L5vKaU5lDRYX7yRur1UYYZmJQ9iDHwN9dndB5n5ejflmm
UsBwLHnDkKXWRuAkb3NeuzqRstiQGP.fCQFdHNzaE.8u58Nz9svFE9SGIE1X
kv9Iwfl1BdNWjA7xcThsWCS847loyFD8pZq2E2F04lYULzBTDYhrFSDDJdjo
fisN2NUN26e4xRu51zD5ZseJ4HC63WyIX6jRqsp0jangBnK.Qlo58PCpWevt
ahzqK7fbKsdX6R64aao8LmWhBPh9jKVAPMzb5a2cV6opdWHneMmqMEmAGsPh
ieigIjV+4gF1GgbMNXg+NH44YaRYyd..S1ThHzKhFwwGRaWVITqyj9FvPqMT
d0pDuSqDrOGF.Uogf.juCFi9WAUkYR+rFPanDcPG8SbrtjyG03ZQ8m3AqC5H
NcUUoXSwVrqXKVcZu.5ZnkwIfIVdXVZTwAuTTUiYuxwjZDK6ZgnRtYV8tJmP
hEcuXgz2Goxyaiw35UkaWbpqtfzD02oUkkYqi.YQbZqIIWrIljFolsdmMKFR
wCJ2+DTn.9QlkOld+d9Qy9IJdpLfy05Ik2b8GsG9h8rdm1ZFx1FrmmlA2snw
qI9Mcdi2nr6q3Gc87nLawurbw1dda+tMyGJ9HaQmlkGwy6davisMgrkM65oz
eulfYCzG46am8tSDK144xV4cEvVMTRXq9CIX8+ALNWb6sttKNkiZetnbz+lx
cQnb1Nds2C0tvLNe14hwQtxYbxhqc17qHfamUcZZ3NYSWqjJuiDoizZ+ud2j
naRK4k3346IIVdR1kKiQjM39adMamvc6n+Xp36Yf3SIGh3uKbquqs1JksTII
kuJ7RrZSFb2Cn9j5a6DT8cMo0iczU+lsYaU8YNVh5k5uzJLU26ZcfuJE6XLY
0mcRp9NTCp+L+Ap+in7Xf3b9jFQBLtIY06PbrGhcrU6N00Qlaf9N0+QPo9nS
P6qsI7aYNLSNOHpsAxis0ggnZLjYqyyFkdSqinVsPaqSDZaYBZ6c93uLCjGm
iCroJVLzU45iNE.pIUfs3TWb.0FejHp9uANr0GcJPTroFDNOHpkIweLnI1QT
dHl3P7LhOF3Ahd9rnvLwAMy5JSdNezGlsIsW9mW44r26js+alhxjlkdhN0YE
YqiH5MTeWo6D4Qm.ieLS7OynmuVGSbmbFUlnWWhiQlhOeN+Yl35bq.tGo9JR
cj8AVqdz7nSgVB9zNj.FTOU68o5d9KO5TUOGxVMw+jTO8T6wqD0hEiHsOJO5
TTOMoS.zlqN0SpZjz6GcH05ylVM0jwuidlkmAif374ih5M5QPfccr8Hqifff
otN8pt3hUcaWu8nosBhwmD0Epw5KmoF.poxy4YHbnjqfPJqcM3Y2vun7nS.i
f3eETiqcRX2LR.4QmhZrkoCSGwzZrqKHrVR8caari+55d2caPqmq5n.ywe8Q
WrZL9fpwVXeaogMByE6y1SMdjk+gbavbN7fYvVtt1C2XwHJSzpk+tidUO25H
UB9onw9mlFQ10fhpZBaDatcMTTEGcJpwzqg92qqiVtM6Cu0IRQ0ndEdfCAqV
l0qYAUmPrctbxO4XCuPMa1asYzKDks1D52ZCne6Mednz9qW8+.vfqkDA
-----------end_max5_patcher-----------
*/
İşleme Kodu
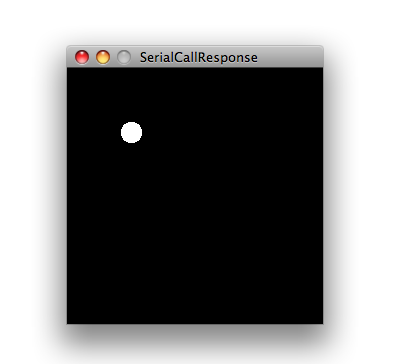
İşleme çizimini yukarıdaki kod örneğinden kopyalayın. Analog sensörün değerini değiştirdikçe, ekranda böyle bir şey hareket eden bir top alırsınız. Top sadece düğmeye bastığınızda görünecektir:
Maks Kod
Maksimum yama buna benziyor. Yukarıdaki kod örneğinden metni kopyalayın.

See Also
- serial.begin()
- serial.available()
- serial.print()
- analogRead()
- ASCIITable- Arduino'nun gelişmiş seri çıkış fonksiyonlarını gösterir.
- Dimmer- Bir LED'in parlaklığını değiştirmek için fareyi hareket ettirin.
- Graph- Verileri bilgisayara gönderin ve İşlemde grafiğini çizin.
- Midi- Seri olarak MIDI not mesajları gönderin.
- MultiSerialMega- Arduino ve Genuino Mega'da bulunan iki seri bağlantı noktasını kullanın.
- PhysicalPixel- İşleme veya Maks / MSP'den kartınıza veri göndererek bir LED'i açın ve kapatın.
- ReadASCIIString- Bir LED'in solması için virgülle ayrılmış bir tamsayı dizesi ayrıştırın.
- SerialCallResponseASCII- Bir çağrı ve yanıt (el sıkışma) yöntemi kullanarak birden çok değişken gönderin ve göndermeden önce değerleri ASCII kodlayın.
- SerialEvent- SerialEvent () kullanımını gösterir.
- VirtualColorMixer- Arduino'dan bilgisayarınıza birden çok değişken gönderin ve bunları İşleme veya Maks / MSP'de okuyun.