
Eğitimler
StepperOneRevolution
Step motorlar, benzersiz tasarımları nedeniyle, herhangi bir geri bildirim mekanizması olmadan yüksek doğrulukta kontrol edilebilir. Bir dizi mıknatıs ile monte edilen bir kademenin şaftı, belirli bir sırayla pozitif ve negatif olarak yüklenen ve küçük "adımlarda" tam olarak ileri veya geri hareket eden bir dizi elektromanyetik bobin tarafından kontrol edilir.
İki tip step vardır, Unipolars ve Bipolars ve hangi tipte çalıştığınızı bilmek çok önemlidir. Motorların her biri için farklı bir devre vardır. Örnek kod her iki motoru da kontrol edecektir. Motorunuzu nasıl bağlayacağınız hakkında bilgi için tek kutuplu ve iki kutuplu motor şemalarına bakın.
Bu örnekte, mil Arduino Step Kütüphanesini kullanarak step motor sayısını yaparak saat yönünde tam bir dönüş yapar. Step, tek kutuplu veya iki kutuplu motorlar için 8, 9, 10 ve 11 numaralı dijital pimlerle kontrol edilir.
Tek kutuplu bir step kullanıyorsanız Arduino veya Genuino kartı bir U2004 Darlington Dizisine veya bipolar motorunuz varsa SN754410NE H-Bridge'e bağlanır .
İki türün farklılıkları hakkında daha fazla bilgi için lütfen Tom Igoe'un step motorlardaki sayfasına bakınız .
Gerekli Donanım
- Arduino veya Genuino Kurulu
- step motor
- U2004 Darlington Dizisi (tek kutuplu bir step kullanılıyorsa)
- SN754410ne H-Bridge (bipolar step kullanıyorsanız)
- kendi step için uygun güç kaynağı
- bağlantı telleri
- breadboard
devreler
Aşağıda hem unipolar hem de bipolar stepler için devreler bulacaksınız. Her iki durumda da, doğrudan Arduino veya Genuino kartınızdan güç için çok fazla çekildikleri için step motorlarınızı harici bir güç kaynağından beslemek en iyisidir.
Not: Aşağıdaki her iki devre de dört telli konfigürasyonlardır. İki kablo yapılandırması sağlanan kodla çalışmaz.
Tek Kutuplu Step Devresi ve Şematik
|
Tek Kutuplu Motor Düğmesi Devresi

Tek Kutuplu Motor Düğmesi Şeması

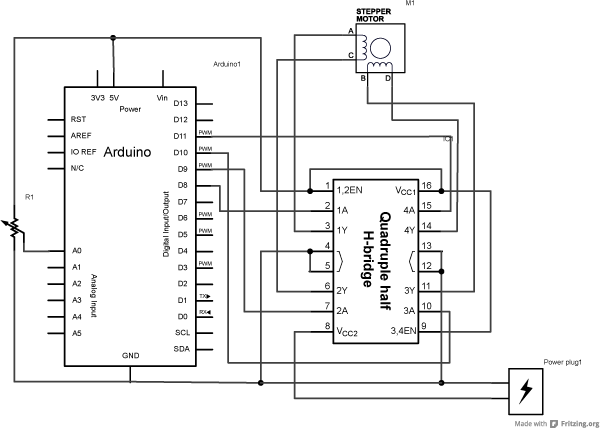
Bipolar Step Devre ve şematik
Bipolar Motor Topuzu Devresi
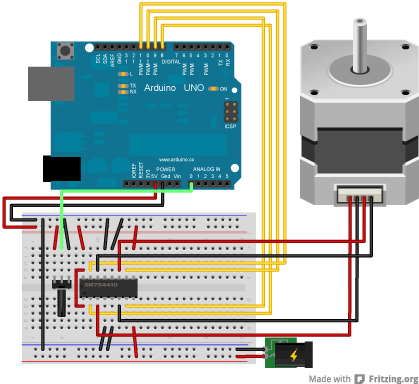
Bipolar Motor Düğmesi Şeması
Kod
Hem unipolar hem de bipolar stepler için
/*
Stepper Motor Control - one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include
See Also
- Stepper myStepper = Stepper(adımlar, pin1, pin2, pin3, pin4)
- stepper.setSpeed()
- stepper.step()
- Stepper library reference
- MotorKnob- Mili bir potansiyometre düğmesinin konumuna göre hareket ettirir.
- StepperOneStepAtATime- Motorun doğru kablolamasını kontrol etmek için tek adım.
- StepperSpeedControl- Adım hızı bir potansiyometre ile kontrol edilir.