
Eğitimler
Ping
SEN136B5B , Seeedstudio'dan ultrasonik bir menzil bulucu. Sensörün önündeki en yakın nesnenin mesafesini algılar (3 cm'den 400 cm'ye). Bir ultrason patlaması göndererek ve bir nesneden sektiğinde yankıyı dinleyerek çalışır. Ultrason ile engellere ping atıyor . Arduino veya Genuino kartı, algılamayı tetiklemek için kısa bir darbe gönderir, ardından pulseIn () işlevini kullanarak aynı pimdeki bir darbeyi dinler. Bu ikinci darbenin süresi, ultrasonun nesneye ve sensöre geri dönmesi için geçen süreye eşittir. Ses hızını kullanarak bu süre mesafeye dönüştürülebilir.
Gerekli Donanım
- Arduino veya Genuino Kurulu
- Ultrasonik Mesafe Bulucu
- bağlantı telleri
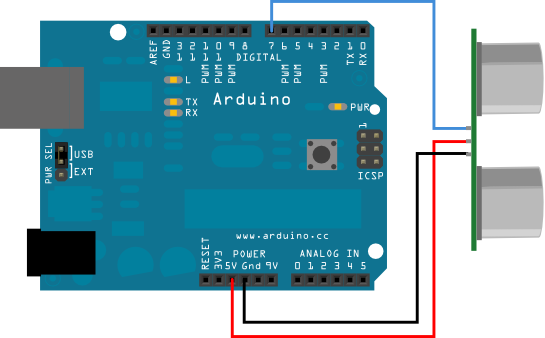
Devre
SEN136B5B'nin 5V pimi, karttaki 5V pimine, GND pimi GND pimine ve SIG (sinyal) pimi karttaki dijital pim 7'ye bağlanır.
büyütmek için resme tıklayın
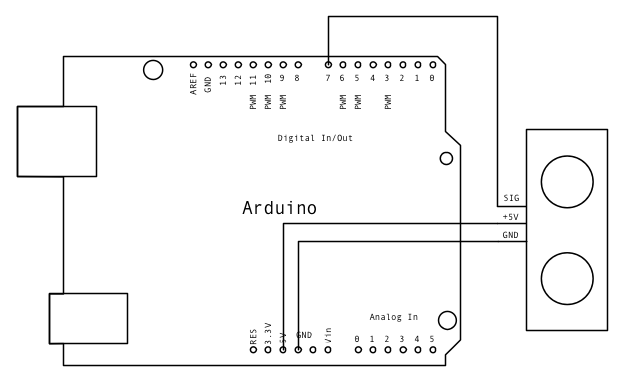
Şematik
büyütmek için resme tıklayın
kod
/*
Ping))) Sensor
This sketch reads a PING))) ultrasonic rangefinder and returns the distance
to the closest object in range. To do this, it sends a pulse to the sensor to
initiate a reading, then listens for a pulse to return. The length of the
returning pulse is proportional to the distance of the object from the sensor.
The circuit:
- +V connection of the PING))) attached to +5V
- GND connection of the PING))) attached to ground
- SIG connection of the PING))) attached to digital pin 7
created 3 Nov 2008
by David A. Mellis
modified 30 Aug 2011
by Tom Igoe
This example code is in the public domain.
http://www.arduino.cc/en/Tutorial/Ping
*/
// this constant won't change. It's the pin number of the sensor's output:
const int pingPin = 7;
void setup() {
// initialize serial communication:
Serial.begin(9600);
}
void loop() {
// establish variables for duration of the ping, and the distance result
// in inches and centimeters:
long duration, inches, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
// The same pin is used to read the signal from the PING))): a HIGH pulse
// whose duration is the time (in microseconds) from the sending of the ping
// to the reception of its echo off of an object.
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds) {
// According to Parallax's datasheet for the PING))), there are 73.746
// microseconds per inch (i.e. sound travels at 1130 feet per second).
// This gives the distance travelled by the ping, outbound and return,
// so we divide by 2 to get the distance of the obstacle.
// See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance travelled.
return microseconds / 29 / 2;
}
See Also
- pinMode()
- delayMicroseconds()
- pulseIn()
- digitalWrite()
- return
- serial.begin()
- serial.print()
- ADXL3xx- Bir ADXL3xx ivmeölçer okuyun.
- Knock- Bir piezo elemanı ile darbelerini tespit edin.
- Memsic2125- İki eksenli ivmeölçer.